Publications
publications in reverse chronological order
* indicates equal contribution or co-first authors.
2025
- ISPA 2025DDC: Efficient Dynamic-Dictionary-Based Compression on Floating Time Series DataKeyue Yang, Dongping Wang, Shijie Li, Wenbin Zhai, Wenjing Wang, Ziyi Zheng, Jinan Wang, and Liang LiuIn 2025 IEEE International Symposium on Parallel and Distributed Processing with Applications (ISPA), 2025. [CCF C]
Growing demand for large-scale time-series data storage has rendered floating-point time-series compression a key technology for better storage efficiency and performance. General-purpose compression methods rely on exact matching to build dictionaries, making them effective for repetitive data but unsuitable for time-series data with small fluctuations and gradual changes. While time-series-specialized compression methods leverage correlations between adjacent data points, they ignore long-term similarities and periodic patterns. To address these limitations, we propose an efficient Dynamic-Dictionary-Based Compression (DDC) algorithm for floating-point time-series data. DDC uses three matching strategies to capture both local patterns and global trends. It dynamically updates the dictionary and adapts its compression strategy during processing. Moreover, DDC reduces precision redundancy by adjusting mantissa bit lengths and separating floating-point components. We evaluate DDC against state-of-the-art time-series-specific (Gorilla, Chimp, AFC, TSXor, FPC) and general-purpose (LZ4, LZW, Snappy) compression algorithms. Experimental results demonstrate that DDC achieves superior compression ratios and faster processing speeds, highlighting its effectiveness and practicality.
@inproceedings{Yang2025ISPA, title = {DDC: Efficient Dynamic-Dictionary-Based Compression on Floating Time Series Data}, author = {Yang, Keyue and Wang, Dongping and Li, Shijie and Zhai, Wenbin and Wang, Wenjing and Zheng, Ziyi and Wang, Jinan and Liu, Liang}, booktitle = {2025 IEEE International Symposium on Parallel and Distributed Processing with Applications (ISPA)}, pages = {1292--1299}, year = {2025}, organization = {IEEE}, doi = {10.1109/ISPA67752.2025.00178}, } - TNSEESTA: An Efficient Spatial-Temporal Range Aggregation Query Processing Algorithm for AAV NetworksLiang Liu*, Wenbin Zhai*, Xin Li, Youwei Ding, Wanying Lu, and Ran WangIEEE Transactions on Network Science and Engineering, 2025. [CCF C, SCI Q2]
Autonomous Aerial Vehicle (AAV) networks are increasingly deployed in military and civilian applications, serving as critical platforms for data collection. Users frequently require aggregated statistical information derived from historical sensory data within specific spatial and temporal boundaries. To address this, users submit aggregation query requests with spatial-temporal constraints to target AAVs that store the relevant data. These AAVs process and return the query results, which can be aggregated within the network during transmission to conserve energy and bandwidth resources that are inherently limited in AAV networks. However, the dynamic topology caused by AAV mobility, coupled with these resource constraints, makes efficient in-network aggregation challenging without compromising user query delay. To the best of our knowledge, existing research has yet to adequately explore spatial-temporal range aggregation queries in the context of AAV networks. In this paper, we propose ESTA, an Efficient Spatial-Temporal Range Aggregation Query Processing algorithm tailored for AAV networks. ESTA leverages pre-planned AAV trajectories to construct a topology change graph that models the network’s evolving connectivity. It then employs an efficient shortest path algorithm to determine the minimum query response delay. Subsequently, while adhering to user-specified delay constraints, ESTA transforms the in-network aggregation process into a series of set cover problems, which are solved recursively to build a Spatial-Temporal Aggregation Tree (STAT). This tree enables the identification of an energy-efficient routing path for aggregating and delivering query results. Extensive simulations demonstrate that ESTA reduces energy consumption by more than 50% compared to the baseline algorithm, all while satisfying the required query delay.
@article{Liu2025TNSE, title = {ESTA: An Efficient Spatial-Temporal Range Aggregation Query Processing Algorithm for {AAV} Networks}, author = {Liu, Liang and Zhai, Wenbin and Li, Xin and Ding, Youwei and Lu, Wanying and Wang, Ran}, journal = {IEEE Transactions on Network Science and Engineering}, volume = {13}, pages = {2623--2643}, year = {2025}, publisher = {IEEE}, doi = {10.1109/TNSE.2025.3619221}, } - PPNAOSIS: Obstacle-Sensitive and Initial-Solution-first path planningKaibin Zhang, Liang Liu, Wenbin Zhai, Youwei Ding, and Jun HuPeer-to-Peer Networking and Applications, 2025. [CCF C, SCI Q2]
Informed path planning is a type of algorithm that uses problem-specific knowledge, expressed as heuristics, to efficiently discover an optimal path between a start and a goal state. The primary challenge in optimizing informed planning algorithms lies in quickly finding the initial solution while minimizing collision checking costs. In this paper, an Obstacle-Sensitive and Initial-Solution-first path planning algorithm (OSIS) is proposed. OSIS leverages historical collision check results to construct an asymptotically accurate distribution of obstacles in space. Based on this distribution, OSIS employs a reusable, inadmissible, yet more accurate heuristic that applies to the entire problem domain. Additionally, an initial-solution-first path optimization strategy is proposed to eliminate unnecessary path optimization. It ensures that OSIS prioritizes exploring uncharted spaces, leading to faster initial solution discovery. Experiments have demonstrated that OSIS outperforms existing algorithms in navigating around obstacles, and achieving convergence in solution cost. Experimental data show that OSIS can even improve the success rate of collision checking to more than 90% in the planning problems studied in this paper, which far exceeds the performance of other algorithms.
@article{Zhang2025PPNA, title = {OSIS: Obstacle-Sensitive and Initial-Solution-first path planning}, author = {Zhang, Kaibin and Liu, Liang and Zhai, Wenbin and Ding, Youwei and Hu, Jun}, journal = {Peer-to-Peer Networking and Applications}, volume = {18}, number = {3}, pages = {160}, year = {2025}, publisher = {Springer}, doi = {10.1007/s12083-025-01968-z}, }
2023
- ICCC 2023EKR: An Efficient K-anycast Routing in UAV NetworksKun Guo, Liang Liu, Wenbin Zhai, and Youwei DingIn 2023 9th International Conference on Computer and Communications (ICCC), 2023
K-anycast refers to a communication model where a message is transmitted from a source to k destinations. Compared to multicast and unicast, k-anycast offers significant advantages in terms of load balancing, redundancy, and improved reliability. As far as we know, there is currently no research on k-anycast for UAV networks. We propose an Efficient K-anycast Routing scheme called EKR. The high dynamism of UAV networks poses a challenge in formalizing and addressing the k-anycast problem. Therefore, this paper utilizes predetermined trajectory information to construct Encounter Record Tree (ER-Tree), which converts dynamically changing network topologies into a static graph. Based on ER-Tree, we formalize the k-anycast problem in UAV networks and transform it into a Group Steiner Tree problem, which is known to be NP-hard. Then an efficient search algorithm is proposed to solve it and find the transmission path. To evaluate the performance of EKR, we performed simulations with the One simulator. The results demonstrate that EKR outperforms existing protocols in terms of delivery rate, end-to-end delay, and network overhead.
@inproceedings{Guo2023ICCC, title = {EKR: An Efficient K-anycast Routing in UAV Networks}, author = {Guo, Kun and Liu, Liang and Zhai, Wenbin and Ding, Youwei}, booktitle = {2023 9th International Conference on Computer and Communications (ICCC)}, pages = {39--45}, year = {2023}, organization = {IEEE}, doi = {10.1109/ICCC59590.2023.10507578}, } - CECCT 2023A Framework for Moving Target Defense based on Federated Semi-Supervised LearningWanying Lu, Wenbin Zhai, Feng Wang, and Yu FanIn Proceedings of the 2023 International Conference on Electronics, Computers and Communication Technology, 2023
In recent years, with the rapid development of the Internet, it has penetrated all areas of daily life. However, due to the complexity of the Internet architecture, there are inevitably some inherent security threats, which could be exploited by adversaries to cause great damage. Moving Target Defense (MTD) has been proposed to solve this problem by building a dynamic, heterogeneous and redundant system architecture. Unfortunately, most of the existing data arbitration algorithms for MTD are based on the majority consensus voting algorithm, which cannot cope with common mode escape. Therefore, in this paper, we propose a framework for moving target defense based on Federated Semi-Supervised Learning (FSSL), called FedDA. In addition to the output data of heterogeneous executives, FedDA leverages their behavior data to assist in data arbitration. Meanwhile, we consider a more realistic assumption that the behavior data of heterogeneous executives is not annotated with ground-truth labels, and FSSL is used for model training. Finally, a data arbitration algorithm combined with historical confidence is proposed to identify malicious executives. Extensive experimental results show that our method can well resist common mode escape and outperform the state-of-the-art data arbitration algorithms.
@inproceedings{Lu2023CECCT, title = {A Framework for Moving Target Defense based on Federated Semi-Supervised Learning}, author = {Lu, Wanying and Zhai, Wenbin and Wang, Feng and Fan, Yu}, booktitle = {Proceedings of the 2023 International Conference on Electronics, Computers and Communication Technology}, pages = {245--250}, year = {2023}, publisher = {ACM}, doi = {10.1145/3637494.3638748}, } - ISPA 2023HBC: Combining Lossy and Lossless Hybrid Bilayer Compression Framework on Time-Series DataWanying Lu, Liang Liu, Wenbin Zhai, Haoyuan Chen, and Yulei LiuIn 2023 IEEE Intl Conf on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), 2023. [CCF C]
The popularization and application of the Internet of Things (IoT) technology has brought massive time series data, which puts forward higher requirements for data compression technology. At present, most existing compression methods use only a single lossy or lossless compression algorithm to perform data compression. Furthermore, traditional lossy compression methods usually adopt a fixed error threshold. However, in practical applications, users have different accuracy requirements for time series data in different numerical ranges. In this paper, we design a Hybrid Bilayer Compression (HBC) framework, which consists of a data accuracy-aware lossy compression layer and a data feature-aware lossless compression layer. First, the original time series data is lossy compressed on the top layer of HBC, where the error threshold can be adaptively adjusted according to the user’s accuracy requirements. Then, based on the features of lossy compressed data, we use supervised learning to select the optimal lossless compression algorithm from the algorithm pool to further compress the data. Experimental results show that compared with three state-of-the-art compression algorithms, HBC reduces the storage space by 52.1%, 91.66%, and 92.27%, respectively.
@inproceedings{Lu2023ISPA, title = {HBC: Combining Lossy and Lossless Hybrid Bilayer Compression Framework on Time-Series Data}, author = {Lu, Wanying and Liu, Liang and Zhai, Wenbin and Chen, Haoyuan and Liu, Yulei}, booktitle = {2023 IEEE Intl Conf on Parallel \& Distributed Processing with Applications, Big Data \& Cloud Computing, Sustainable Computing \& Communications, Social Computing \& Networking (ISPA/BDCloud/SocialCom/SustainCom)}, pages = {670--679}, year = {2023}, organization = {IEEE}, doi = {10.1109/ISPA-BDCloud-SocialCom-SustainCom59178.2023.00120}, } - ICPADS 2023OSIS: Obstacle-Sensitive and Initial-Solution-first path planningKaibin Zhang, Liang Liu, Wenbin Zhai, Youwei Ding, and Jun HuIn 2023 IEEE 29th International Conference on Parallel and Distributed Systems (ICPADS), 2023. [CCF C]
Informed path planning is a type of algorithm that uses problem-specific knowledge, expressed as heuristics, to efficiently discover an optimal path between a start and goal state. The efficiency of an informed algorithm is contingent upon how quickly the planner can find the initial solution and the associated overhead involved in collision detection. Existing informed planners do not fully exploit the information contained in historical collision detection results, resulting in additional unnecessary collision detections. Furthermore, they optimize paths through rewiring before discovering an initial solution. This approach not only hampers the planner’s space exploration, but also generates a superfluous amount of unproductive overhead. In this paper, an Obstacle-Sensitive and Initial-Solution-first path planning algorithm (OSIS) is proposed. OSIS leverages historical collision detection results to construct an asymptotically accurate distribution of obstacles in space. Based on this distribution, OSIS employs a reusable, inadmissible yet more accurate heuristic that applies to the entire problem domain. Additionally, an initial-solution-first path optimization strategy is proposed to eliminate unnecessary path optimization. It ensures that OSIS prioritizes exploring uncharted spaces, leading to faster initial solution discovery. Experiments have demonstrated that OSIS outperforms existing algorithms in navigating around obstacles, and achieving convergence in solution cost.
@inproceedings{Zhang2023ICPADS, title = {OSIS: Obstacle-Sensitive and Initial-Solution-first path planning}, author = {Zhang, Kaibin and Liu, Liang and Zhai, Wenbin and Ding, Youwei and Hu, Jun}, booktitle = {2023 IEEE 29th International Conference on Parallel and Distributed Systems (ICPADS)}, pages = {2795--2797}, year = {2023}, organization = {IEEE}, doi = {10.1109/ICPADS60453.2023.00384}, } - CDICS 2023Power-Aware Path Planning for Vehicle-Assisted Heterogeneous UAVs in Mobile Crowd SensingZixiao Zhou, Liang Liu, Wenbin Zhai, Jiancheng Song, and Yulei LiuIn 2023 International Conference on Data, Information and Computing Science (CDICS), 2023
With the development of microelectronics in recent years, the performance of unmanned aerial vehicles (UAVs) has been improving continuously. Modern rotary-wing UAVs possess high maneuverability and agility, making them widely applied in mobile crowd sensing (MCS). In order to solve the shortcoming of limited battery capacity and expand the mission area of UAVs, the ground vehicle is introduced as a platform for transportation, launch, recycle, and recharging UAVs. However, existing studies only consider the case of vehicle-assisted homogeneous UAVs. In reality, due to different sensing requirements and UAV hardware, vehicles may need to assist heterogeneous UAVs with different sensors, flight speeds, and battery capacities. In this paper, we formalize and study the vehicle-assisted heterogeneous UAVs path planning problem, and decompose it into three sub-problems, namely detection point allocation, UAV path planning, and vehicle route planning. In order to solve the above problems, we propose an efficient power-aware path planning algorithm for vehicle-assisted multi-heterogeneous-UAV (VHUPA). In VHUPA, we first design the genetic algorithm to find the allocation scheme of the detection points, then plan flight paths of UAVs at each parking spot according to the allocation scheme, and finally optimize the route of the ground vehicle according to the power consumption of UAVs to minimize the waiting time for charging. Performance evaluation demonstrates that time cost of the VHUPA solution is reduced by more than 21% compared with the existing algorithm.
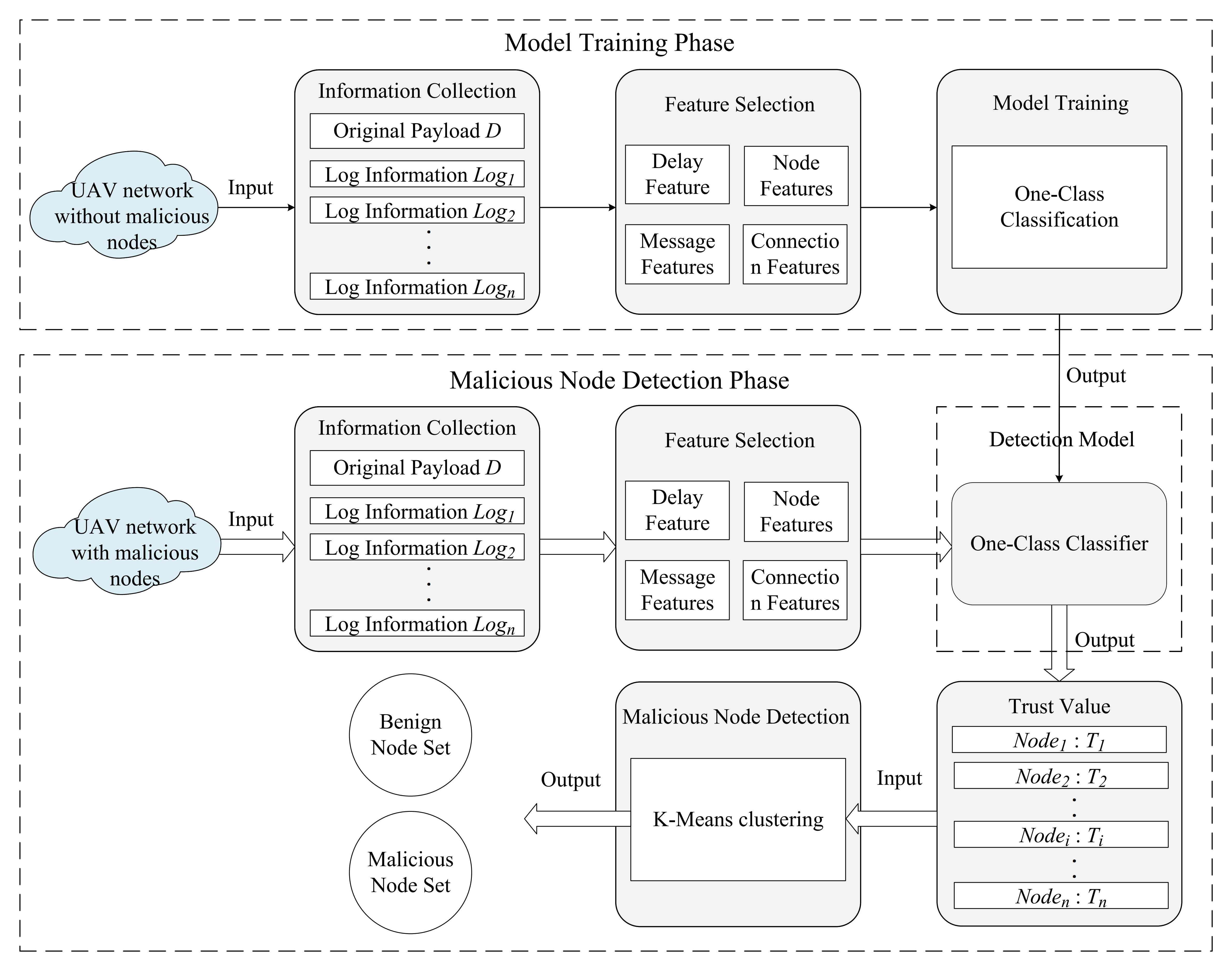
@inproceedings{Zhou2023CDICS, title = {Power-Aware Path Planning for Vehicle-Assisted Heterogeneous UAVs in Mobile Crowd Sensing}, author = {Zhou, Zixiao and Liu, Liang and Zhai, Wenbin and Song, Jiancheng and Liu, Yulei}, booktitle = {2023 International Conference on Data, Information and Computing Science (CDICS)}, pages = {14--19}, year = {2023}, publisher = {IEEE}, doi = {10.1109/CDICS61497.2023.00013}, } - ETD: An Efficient Time Delay Attack Detection Framework for UAV NetworksWenbin Zhai, Liang Liu, Youwei Ding, Shanshan Sun, and Ying GuIEEE Transactions on Information Forensics and Security, 2023. [CORE A, CCF A, SCI Q1]
In recent years, Unmanned Aerial Vehicle (UAV) networks are widely used in both military and civilian scenarios. However, due to the distributed nature, they are also vulnerable to threats from adversaries. Time delay attack is a type of internal attack which maliciously delays the transmission of data packets and further causes great damage to UAV networks. Furthermore, it is easy to implement and difficult to detect due to the avoidance of packet modification and the unique characteristics of UAV networks. However, to the best of our knowledge, there is no research on time delay attack detection in UAV networks. In this paper, we propose an Efficient Time Delay Attack Detection Framework (ETD). First, we collect and select delay-related features from four different dimensions, namely delay, node, message and connection. Meanwhile, we utilize the pre-planned trajectory information to accurately calculate the real forwarding delay of nodes. Then, one-class classification is used to train the detection model, and the forwarding behaviors of all nodes can be evaluated, based on which their trust values can be obtained. Finally, the K-Means clustering method is used to distinguish malicious nodes from benign ones according to their trust values. Through extensive simulation, we demonstrate that ETD can achieve higher than 80% detection accuracy with less than 2.5% extra overhead in various settings of UAV networks and different routing protocols.
@article{ETD, title = {ETD: An Efficient Time Delay Attack Detection Framework for UAV Networks}, author = {Zhai, Wenbin and Liu, Liang and Ding, Youwei and Sun, Shanshan and Gu, Ying}, journal = {IEEE Transactions on Information Forensics and Security}, volume = {18}, pages = {2913--2928}, year = {2023}, publisher = {IEEE}, doi = {10.1109/TIFS.2023.3272862}, } - ISMAPP: An efficient multi-location task allocation framework with personalized location privacy-protecting in spatial crowdsourcingYu Fan, Liang Liu, Xingxing Zhang, Huibin Shi, and Wenbin ZhaiInformation Sciences, 2023. [CORE A, CCF B, SCI Q1]
Due to its wide coverage and strong scalability, spatial crowdsourcing (SC) has become a research hotspot in recent years. In order to assign tasks to closer workers, it is necessary for workers to provide accurate locations to the server. However, it will result in the leakage of the participants’ location privacy. Existing works provide each worker with the same level of location privacy protection, which cannot meet the different privacy requirements of various workers. In addition, most works assume that the tasks are single-location tasks, and do not consider multi-location tasks. In this paper, we propose the Multi-location Task Allocation Problem with personalized location privacy protection (MLTAP). As far as we know, we are the first to study MLTAP. We propose a Multi-location task Allocation framework with Personalized location Privacy-protecting (MAPP). In order to allocate tasks efficiently, we use the R-tree to store workers and minimum bounding rectangle to represent multi-location tasks, thus filtering the unreachable workers for tasks. To better eliminate the adverse effect of location confusion, the SC server sorts candidate workers by the ranking metrics and allocates multi-location tasks efficiently. Finally, we conduct experiments to verify that MAPP has good performance in terms of utility.
@article{Fan2023IS, title = {MAPP: An efficient multi-location task allocation framework with personalized location privacy-protecting in spatial crowdsourcing}, author = {Fan, Yu and Liu, Liang and Zhang, Xingxing and Shi, Huibin and Zhai, Wenbin}, journal = {Information Sciences}, volume = {619}, pages = {654--678}, year = {2023}, publisher = {Elsevier}, doi = {10.1016/j.ins.2022.11.075}, } - JPDC
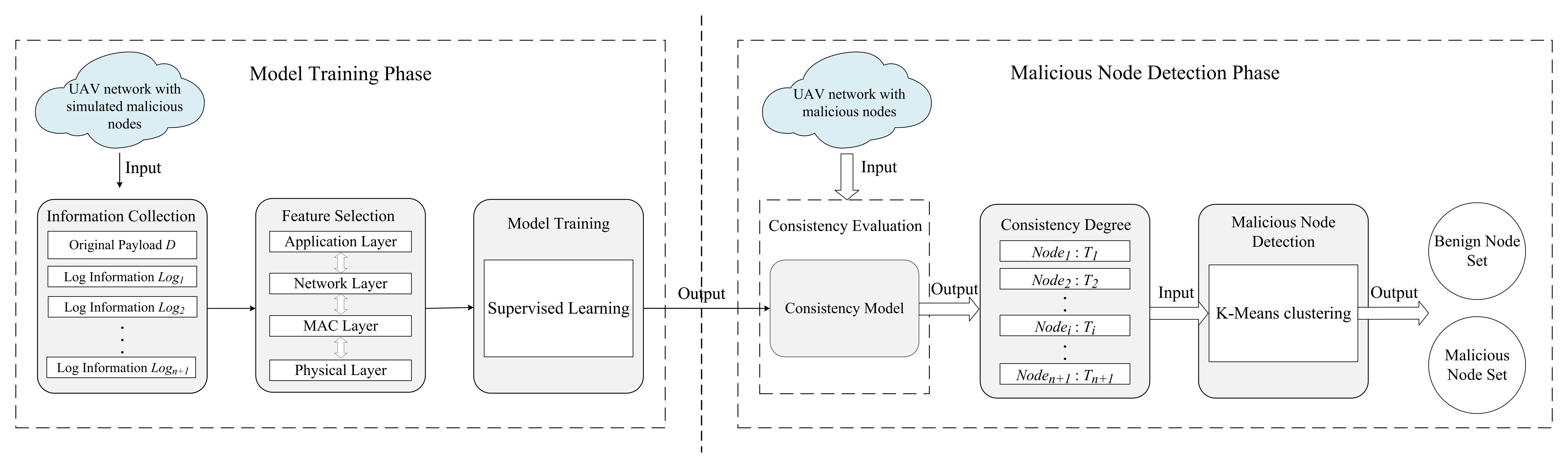 HOTD: A holistic cross-layer time-delay attack detection framework for unmanned aerial vehicle networksWenbin Zhai, Shanshan Sun, Liang Liu, Youwei Ding, and Wanying LuJournal of Parallel and Distributed Computing, 2023. [CORE A, CCF B, SCI Q1]
HOTD: A holistic cross-layer time-delay attack detection framework for unmanned aerial vehicle networksWenbin Zhai, Shanshan Sun, Liang Liu, Youwei Ding, and Wanying LuJournal of Parallel and Distributed Computing, 2023. [CORE A, CCF B, SCI Q1]Recently, unmanned aerial vehicle (UAV) networks have been widely used in military and civilian scenarios; however, they suffer various attacks. Time-delay attacks maliciously delay the transmission of packets without tampering with the contents or significantly affecting the transmission pattern, making detection difficult. In this paper, a holistic cross-layer time-delay attack detection framework (HOTD) is proposed for UAV networks. A holistic selection of the delay-related features available at all layers is performed, before adopting supervised learning to build a consistency model between these features and the corresponding forwarding delay to calculate the degree of consistency of each node. Finally, the clustering method is used to distinguish malicious from benign nodes according to their degree of consistency. Experimental results show that the performance of HOTD is superior to that of state-of-the-art detection methods, and it achieves a detection accuracy higher than 85% with less than 2.5% additional overhead.
@article{HOTD, title = {HOTD: A holistic cross-layer time-delay attack detection framework for unmanned aerial vehicle networks}, author = {Zhai, Wenbin and Sun, Shanshan and Liu, Liang and Ding, Youwei and Lu, Wanying}, journal = {Journal of Parallel and Distributed Computing}, volume = {177}, pages = {117--130}, year = {2023}, publisher = {Elsevier}, doi = {10.1016/j.jpdc.2023.03.001}, } - FGCSAn efficient data collection algorithm for partitioned wireless sensor networksGongshun Min, Liang Liu, Wenbin Zhai, Zijie Wang, and Wanying LuFuture Generation Computer Systems, 2023. [CORE A, CCF C, SCI Q1]
Data collection with mobile agent (MA) can balance the energy consumption of nodes in partitioned wireless sensor networks. However, the existing data collection algorithms for partitioned WSNs do not formalize the problem systematically. These algorithms are not efficient and difficult to meet the timeliness requirement. In order to solve the above shortcomings, we first formalize the Data Collection Problem (DCP). Then, it is transformed into a Generalized Traveling Salesman Problem (GTSP), and we propose a GTSP-Based data collection Algorithm (GBA) to calculate the rendezvous points (RPs) and the moving path of MA. GBA selects RPs by solving the GTSP problem. Furthermore, based on GBA, we take advantage of constructing convex hull to plan a more efficient moving path for MA. In addition, in order to reduce the energy burden on the RPs, we design an Improved Shortest Path tree (ISP tree) to aggregate data from nodes to RPs in partitioned WSNs. Finally, extensive simulations demonstrate the effectiveness and advantages of our algorithm in terms of the length of MA’s moving path and the amount of data collection per unit time.
@article{Min2023FGCS, title = {An efficient data collection algorithm for partitioned wireless sensor networks}, author = {Min, Gongshun and Liu, Liang and Zhai, Wenbin and Wang, Zijie and Lu, Wanying}, journal = {Future Generation Computer Systems}, volume = {140}, pages = {53--66}, year = {2023}, publisher = {Elsevier}, doi = {10.1016/j.future.2022.09.006}, } - PPNAEfficient time-delay attack detection based on node pruning and model fusion in IoT networksWenjie Zhao, Yu Wang, Wenbin Zhai, Liang Liu, and Yulei LiuPeer-to-Peer Networking and Applications, 2023. [CCF C, SCI Q2]
IoT devices are vulnerable to various attacks because they are resource-limited. This paper introduces a novel type of attack called time-delay attack. The malicious nodes delay packet forwarding by extending the processing time of packets, thus affecting the performance and availability of the network. This attack is very stealthy and difficult to detect because it does not violate any communication protocol. To the best of our knowledge, how to detect the time-delay attack in IoT networks is still an open problem. We first propose a machine learning-based baseline algorithm to detect the time-delay attack. It models the system features of each node and the forwarding time of packets to detect whether a node is malicious or not. However, the baseline algorithm needs to detect all nodes in the network, which causes unnecessary resource consumption. Moreover, using a single model in the baseline algorithm does not have high robustness. To reduce the overhead and improve the detection performance, we design an efficient Detection algorithm based on Node pruning and Model fusion (DNM). DNM uses node pruning to filter out suspected nodes from all nodes. The suspected nodes are then detected according to a fusion model. We conduct experimental evaluations based on the Cooja network simulator. The experimental results show that baseline and DNM possess close to 90% accuracy, and DNM significantly outperforms other algorithms with an average F1-score of 0.85.
@article{Zhao2023PPNA, title = {Efficient time-delay attack detection based on node pruning and model fusion in IoT networks}, author = {Zhao, Wenjie and Wang, Yu and Zhai, Wenbin and Liu, Liang and Liu, Yulei}, journal = {Peer-to-Peer Networking and Applications}, volume = {16}, number = {2}, pages = {1286--1309}, year = {2023}, publisher = {Springer}, doi = {10.1007/s12083-023-01477-x}, } - ThesisResearch on Routing Protocol for Multi-hop Unmanned Aerial Vehicle Ad-hoc Networks (in Chinese)Wenbin ZhaiNanjing University of Aeronautics and Astronautics, 2023. Outstanding Postgraduate Thesis of Jiangsu Province and Outstanding Postgraduate Thesis of Jiangsu Computer Society
With the development of technologies such as sensors and wireless communications, Unmanned Aerial Vehicle (UAV) ad-hoc networks have been widely used in military and civilian applications. Routing technology is the basic premise for data communication, information sharing, and cluster collaboration of UAV networks, which needs to take both performance and security into account. However, many unique characteristics of UAV networks, such as high-speed mobility of nodes, high dynamics of network topology, and sparse distribution of nodes, pose severe challenges to the design of routing protocols. In this paper, the routing technology for multi-hop UAV networks is studied from the perspective of holistic cross-layer optimization.
2022
- EISA 2022Link Aware Aggregation Query with Privacy-Preserving Capability in Wireless Sensor NetworksYunfeng Cui, Wenbin Zhai, Liang Liu, Youwei Ding, and Wanying LuIn International Symposium on Emerging Information Security and Applications, 2022
In wireless sensor networks (WSNs), users often submit spatial range queries to obtain statistical information of an area in the network, such as the average temperature and the maximum humidity of an area. The existing privacy-preserving aggregation query algorithms depend on pre-established network topology, and maintaining network topology requires lots of energy. In addition, these algorithms assume that the nodes between the communication radius can perform perfect communication, which is impractical. Aiming to solve these problems, this paper proposes a link aware aggregation query algorithm with privacy-preserving capability, that is, Reliable Spatial Range Data Aggregation Query with Privacy-Preserving (RPSAQ). RPSAQ first divides the query area into multiple sub-areas, and each sub-area is divided into multiple grids according to the network topology and link quality. Under the condition of ensuring node-perceived data privacy, RPSAQ collects sensing data of nodes by traversing the grids in the query area, which not only reduces the packet loss rate and energy consumption of sensor nodes, but also ensures the sensing data’s privacy. The experiment results show that RPSAQ outperforms the existing privacy protection algorithms in terms of packet transmission, energy consumption and query result quality.
@inproceedings{Cui2022EISA, title = {Link Aware Aggregation Query with Privacy-Preserving Capability in Wireless Sensor Networks}, author = {Cui, Yunfeng and Zhai, Wenbin and Liu, Liang and Ding, Youwei and Lu, Wanying}, booktitle = {International Symposium on Emerging Information Security and Applications}, pages = {209--224}, year = {2022}, publisher = {Springer}, doi = {10.1007/978-3-031-23098-1_13}, } - WASA 2022
 PAR: A Power-Aware Routing Algorithm for UAV NetworksWenbin Zhai, Liang Liu, Jianfei Peng, Youwei Ding, and Wanying LuIn International Conference on Wireless Algorithms, Systems, and Applications, 2022. [CCF C]
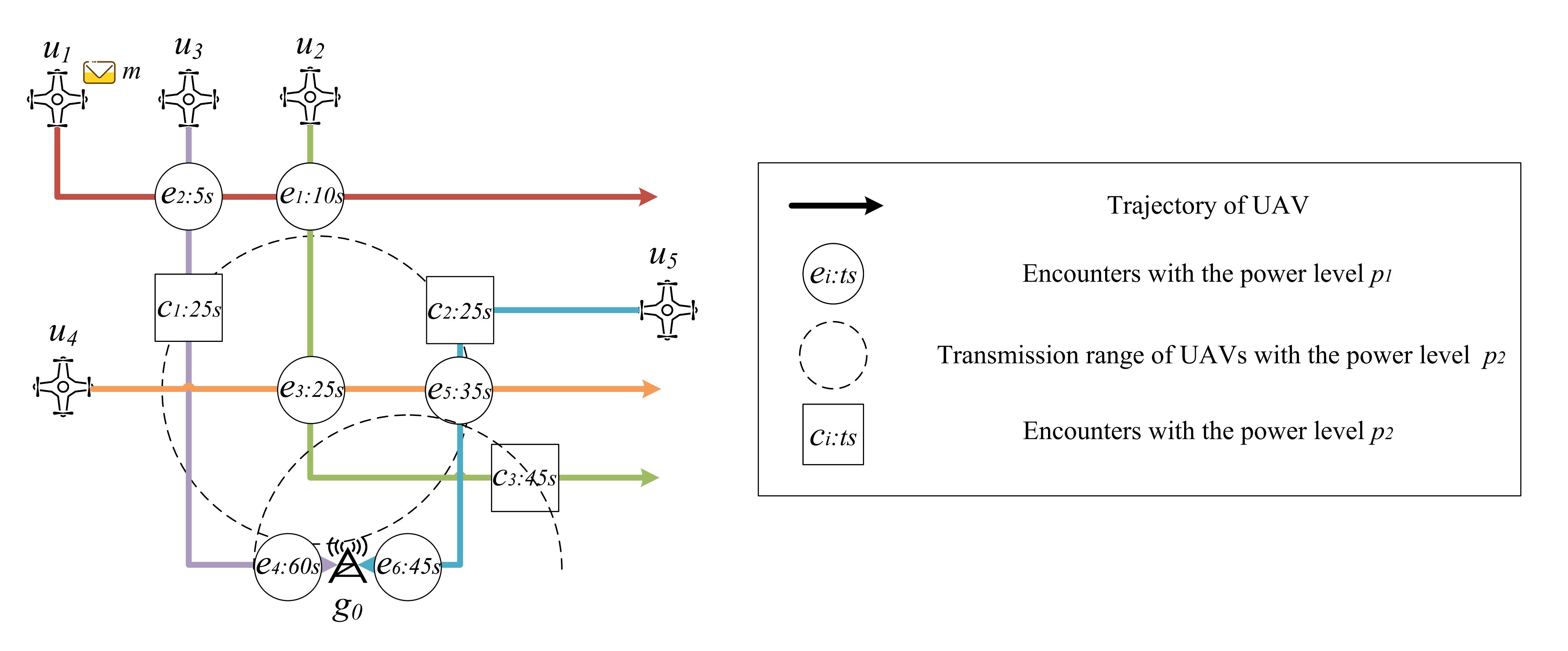
PAR: A Power-Aware Routing Algorithm for UAV NetworksWenbin Zhai, Liang Liu, Jianfei Peng, Youwei Ding, and Wanying LuIn International Conference on Wireless Algorithms, Systems, and Applications, 2022. [CCF C]Unmanned Aerial Vehicles (UAVs) have been widely used in both military and civilian scenarios since they are low in cost and flexible in use. They can adapt to a wide variety of dangerous scenarios and complete many tasks that manned aerial vehicles (MAVs) cannot undertake. In order to establish connectivity and collect data in large areas, numerous UAVs often cooperate with each other and set up a UAV wireless network. Many multi-hop routing protocols have been proposed to efficiently deliver messages with high delivery ratio and low energy consumption. However, most of them do not consider that the power level of UAVs is adjustable. In this paper, we propose a Power-Aware Routing (PAR) algorithm for UAV networks. PAR utilizes the pre-planned trajectory information of UAVs to compute the encounters at different power levels, and then constructs a power-aware encounter tree to calculate the transmission path with minimum energy consumption from the source to the destination within the delay constraint. Through extensive simulations, we demonstrate that compared with three classic algorithms, PAR significantly reduces the energy consumption and improves the network performance on the basis of ensuring timely delivery of packets.
@inproceedings{PAR, title = {PAR: A Power-Aware Routing Algorithm for UAV Networks}, author = {Zhai, Wenbin and Liu, Liang and Peng, Jianfei and Ding, Youwei and Lu, Wanying}, booktitle = {International Conference on Wireless Algorithms, Systems, and Applications}, pages = {333--344}, year = {2022}, organization = {Springer}, doi = {10.1007/978-3-031-19211-1_28}, } - SCNDetection of Packet Dropping Attack Based on Evidence Fusion in IoT NetworksWeichen Ding, Wenbin Zhai, Liang Liu, Ying Gu, and Hang GaoSecurity and Communication Networks, 2022. [CCF C, SCI Q3]
Internet of Things (IoT) is widely used in environmental monitoring, smart healthcare, and other fields. Due to its distributed nature, IoT is vulnerable to various internal attacks. One of these attacks is the packet-dropping attack, which is very harmful. The existing packet-dropping attack detection algorithms are unsuitable for emerging resource-constrained IoT networks. For example, ML-based algorithms always inject numerous packets to obtain the training dataset. However, it is heavyweight for energy-limited nodes to forward these extra packets. In this paper, we propose a lightweight evidence fusion-based detection algorithm (EFDA), which leverages the packet forwarding evidence to identify malicious nodes. Firstly, EFDA finds the sequence numbers of dropped packets and their corresponding source nodes. Then, it traces the routing path of each dropped packet and collects evidence for detection. The evidence stored by nodes around the path record the node’s forwarding behaviors. Finally, the collected evidence is fused to evaluate the trust of nodes. Based on nodes’ trust, the K-means clustering is used to distinguish between malicious nodes and benign nodes. We conduct simulation experiments to compare EFDA with ML-based algorithms. The experimental results demonstrate that EFDA can detect the packet-dropping attack without injecting packets and achieve a higher detection accuracy.
@article{Ding2022SCN, title = {Detection of Packet Dropping Attack Based on Evidence Fusion in IoT Networks}, author = {Ding, Weichen and Zhai, Wenbin and Liu, Liang and Gu, Ying and Gao, Hang}, journal = {Security and Communication Networks}, volume = {2022}, number = {1}, pages = {1028251}, year = {2022}, publisher = {Wiley Online Library}, doi = {10.1155/2022/1028251}, } - WCMCPath Planning for Multi-Vehicle-Assisted Multi-UAVs in Mobile CrowdsensingJiancheng Song, Liang Liu, Yulei Liu, Jie Xi, and Wenbin ZhaiWireless Communications and Mobile Computing, 2022. [CCF C, SCI Q3]
Due to the capability of fast deployment and controllable mobility, unmanned aerial vehicles (UAVs) play an important role in mobile crowdsensing (MCS). However, constrained by limited battery capacity, UAVs cannot serve a wide area. In response to this problem, the ground vehicle is introduced and used to transport, release, and recycle UAVs. However, existing works only consider a special scenario, one ground vehicle with multiple UAVs. In this paper, we consider a more general scenario, multiple ground vehicles with multiple UAVs. We formalize the multi-vehicle-assisted multi-UAV path planning problem, which is a joint route planning and task assignment problem (RPTSP). To solve RPTSP, an efficient multi-vehicle-assisted multi-UAV path planning algorithm (MVP) is proposed. In MVP, we first allocate the detecting points to proper parking spots and then propose an efficient heuristic allocation algorithm EHA to plan the paths of ground vehicles. Besides, a genetic algorithm and reinforcement learning are utilized to plan the paths of UAVs. MVP maximizes the profits of an MCS carrier with a response time constraint and minimizes the number of employed vehicles. Finally, performance evaluation demonstrates that MVP outperforms the baseline algorithm.
@article{Song2022WCMC, title = {Path Planning for Multi-Vehicle-Assisted Multi-UAVs in Mobile Crowdsensing}, author = {Song, Jiancheng and Liu, Liang and Liu, Yulei and Xi, Jie and Zhai, Wenbin}, journal = {Wireless Communications and Mobile Computing}, volume = {2022}, number = {1}, pages = {9778188}, year = {2022}, publisher = {Wiley Online Library}, doi = {10.1155/2022/9778188}, } - PPNAPower level aware charging schedule in wireless rechargeable sensor networkYanlin Wang, Liang Liu, Mengqi Li, Wenbin Zhai, Weihua Ma, and Hang GaoPeer-to-Peer Networking and Applications, 2022. [CCF C, SCI Q2]
With the development of wireless power transportation technology, wireless rechargeable sensor networks (WRSN) are widely used. To prolong the lifetime of WRSNs and make sure the completion of the long-time tasks, mobile charger (MC) is scheduled to charge sensor nodes wirelessly and prolong their lifetime. Existing studies typically assume that the charging power is fixed, which is unreasonable in real scenarios because current chargers can adjust the charging power. In this paper, we take adjustable charging power into consideration and propose the power level aware charging schedule (PACS) problem, which is proved to be NP-hard. To solve the PACS problem, we discretize the network area into several grids. Then we reformulate PACS as a monotone submodular optimization problem and propose an effective algorithm to solve it. Finally, we conducted experiments to evaluate our scheme. The experiment results show that our algorithm achieves better performance than the comparison algorithms by at least 25.42% and 10% on average in terms of charging utility and survival rate.
@article{Wang2022PPNA, title = {Power level aware charging schedule in wireless rechargeable sensor network}, author = {Wang, Yanlin and Liu, Liang and Li, Mengqi and Zhai, Wenbin and Ma, Weihua and Gao, Hang}, journal = {Peer-to-Peer Networking and Applications}, volume = {15}, number = {6}, pages = {2589--2602}, year = {2022}, publisher = {Springer}, doi = {10.1007/s12083-022-01362-z}, }
2021
- MSN 2021A robust fixed path-based routing scheme for protecting the source location privacy in WSNsLingling Hu, Liang Liu, Yulei Liu, Wenbin Zhai, and Xinmeng WangIn 2021 17th International Conference on Mobility, Sensing and Networking (MSN), 2021. [CCF C]
With the development of wireless sensor networks (WSNs), WSNs have been widely used in various fields such as animal habitat detection, military surveillance, etc. This paper focuses on protecting the source location privacy (SLP) in WSNs. Existing algorithms perform poorly in non-uniform networks which are common in reality. In order to address the performance degradation problem of existing algorithms in non-uniform networks, this paper proposes a robust fixed path-based random routing scheme (RFRR), which guarantees the path diversity with certainty in non-uniform networks. In RFRR, the data packets are sent by selecting a routing path that is highly differentiated from each other, which effectively protects SLP and resists the backtracking attack. The experimental results show that RFRR increases the difficulty of the backtracking attack while maintaining the balance between security and energy consumption.
@inproceedings{Hu2021MSN, title = {A robust fixed path-based routing scheme for protecting the source location privacy in WSNs}, author = {Hu, Lingling and Liu, Liang and Liu, Yulei and Zhai, Wenbin and Wang, Xinmeng}, booktitle = {2021 17th International Conference on Mobility, Sensing and Networking (MSN)}, pages = {48--55}, year = {2021}, publisher = {IEEE}, doi = {10.1109/MSN53354.2021.00023}, }
2020
- ThesisDesign and Implementation of a Method for the Safe Storage of Chinese Medicine Data based on Homomorphic Encryption (in Chinese)Wenbin ZhaiNanjing University of Chinese Medicine, 2020. Outstanding Undergraduate Thesis of Jiangsu Province
With the explosive growth of traditional Chinese medicine data and the widespread use of cloud computing, medical institutions have gradually moved the storage and analysis of medical data from the local to the cloud. Because medical data has extremely high economic and medical value, and contains a large amount of patients’ privacy information, most medical institutions must encrypt data before storing it in the cloud. However, we cannot directly operate the encrypted data by using the traditional encryption method, and the data must be decrypted to obtain the plain text before analysis and operation, which cannot guarantee the security and privacy of the data. This paper proposes a method for storing Chinese medicine data based on homomorphic encryption, including encryption, decryption and retrieval algorithms, using plaintext slots to merge after packet encryption, merge after packet decryption and perform ciphertext search on packets, based on the Client / Server mode, you can directly operate the ciphertext, while ensuring the effectiveness of users’ operations, and the security of user data. Experimental results show that the scheme has good security and good practicability in the storage and operation of Chinese medicine data.